Sissejuhatus
Alates 2019/2020 õppeaastast alustasime 4. ja 7. klassi tehnoloogiaõpetuse tundide läbiviimist erinevaid robootika ja mehaanika komplekte kasutades. Ühelt poolt tingis sellise otsuse kooli õpilaskonna kiire kasv, mille tõttu on kooli töökoda ülekoormatud. Teisest küljest seondub tehnoloogia järjest rohkem robootika ja programmeerimisega.
4. ja 7. klass said valitud seetõttu, et võimaldada teise nurga alt tehnoloogiaõpetuse õppimist nii II kui ka III kooliastmes. Samuti toimub nendes klassides informaatika õppimine (lisaks veel ka 2. klass), mis loob eelduse võimalikule lõimingule nende ainete vahel.
Allpool on väike ülevaade töödest, mida teostasime 7. klassi tehnoloogiaõpetuse tundides, mis toimusid iganädalaselt paaristunnina (45+45 min). Näidismaterjalid on on võetud õpilaste isiklikest õpiveebidest (Student Weebly). 4. klassi tundides, mis toimusid iganädalaselt ühe tunni kaupa (45 min), me nii põhjalikult õpiveebe täita ei jõudnud. Loodetavasti saame kogutud kogemuse baasil järgmisel õppeaastal seda materjali täiendada ka 4. klassi tööde osas.
4. ja 7. klass said valitud seetõttu, et võimaldada teise nurga alt tehnoloogiaõpetuse õppimist nii II kui ka III kooliastmes. Samuti toimub nendes klassides informaatika õppimine (lisaks veel ka 2. klass), mis loob eelduse võimalikule lõimingule nende ainete vahel.
Allpool on väike ülevaade töödest, mida teostasime 7. klassi tehnoloogiaõpetuse tundides, mis toimusid iganädalaselt paaristunnina (45+45 min). Näidismaterjalid on on võetud õpilaste isiklikest õpiveebidest (Student Weebly). 4. klassi tundides, mis toimusid iganädalaselt ühe tunni kaupa (45 min), me nii põhjalikult õpiveebe täita ei jõudnud. Loodetavasti saame kogutud kogemuse baasil järgmisel õppeaastal seda materjali täiendada ka 4. klassi tööde osas.
Energia
Alustasime õppetööd energia teemaga. Selleks kasutasime LEGO taastuvenergia (LEGO Education Renewable Energy Add-on Set) ja LEGO lihtsad ja motoriseeritud masinad (LEGO Education Simple & Powered Machines Set) komplekte.
Algus oli keeruline, sest kolme klassi peale oli kasutamiseks vaid üks taastuvenergia ja üks lihtsate ja motoriseeritud masinate komplekt. Suutsime siiski teiste LEGO komplektide detaile kasutades ehitada erinevaid energia tootmise mudeleid ning õpilastele pakkus erilist lõbu toodetud energia rakendamine lihtsa sõiduki käivitamiseks. Teoreetilise alusene kasutasime 7. klassi tehnoloogia õpikut (energia teema). Praktilised ehitusjuhendid ja tunnikavad kohandasime LEGO kodulehelt (education.lego.com/en-us/lessons/renewable-energy).
Kahjuks polnud esimeste tööde valmimisel rakendatud õpiveebi täitmise kohustus ning seetõttu puudub ka nende kohta kajastus.
Algus oli keeruline, sest kolme klassi peale oli kasutamiseks vaid üks taastuvenergia ja üks lihtsate ja motoriseeritud masinate komplekt. Suutsime siiski teiste LEGO komplektide detaile kasutades ehitada erinevaid energia tootmise mudeleid ning õpilastele pakkus erilist lõbu toodetud energia rakendamine lihtsa sõiduki käivitamiseks. Teoreetilise alusene kasutasime 7. klassi tehnoloogia õpikut (energia teema). Praktilised ehitusjuhendid ja tunnikavad kohandasime LEGO kodulehelt (education.lego.com/en-us/lessons/renewable-energy).
Kahjuks polnud esimeste tööde valmimisel rakendatud õpiveebi täitmise kohustus ning seetõttu puudub ka nende kohta kajastus.
pneumaatika
Energia teema jätkuna tegelesime pisut suruõhu rakendamisega töö tegemiseks. Seda teemat sai väga hästi kasutada energia muundumise ja jäävuse selgitamseks, mis haakub loodusõpetuse ja edaspidi füüsika õppesisuga. Kasutasime LEGO pneumaatika (LEGO Education Pneumatics Add-on Set) ja LEGO lihtsad ja motoriseeritud masinad (LEGO Education Simple & Powered Machines Set) komplekte. Juhendmaterjalid, mida kasutasime saime taas LEGO kodulehelt (education.lego.com/en-us/lessonsfilter?Products=Pneumatics+Add-on+Set). Nüüd oli tundide läbiviimine juba lihtsam, sest kasutada oli kolm pneumaatika komplekti ning mudelite ehitamise juures saime taas kasutada teiste LEGO komplektide detaile. Alates nendest töödest hakkasime ka järjepidevalt õpiveebi täitma.
Pneumaatiline käsi: Markus (7.a)
Pneumaatiline press: Renar (7.a)
Pneumaatiline tõstuk: Kristofer (7.a)
Modelleerimine snapcadis ja lihtmehhanismid
Sissejuhatusena VEX IQ robootikakomplektide kasutusele võtmiseks tegime tutvust 3D modelleerimisega SnapCAD-is (www.vexrobotics.com/vexiq/resources/cad-snapcad). Alustuseks kasutasime õppevideoid (www.youtube.com/watch?v=y6yF8NSoDkA&list=PLvvcc7S26YEhA0v9Q81JRunI0yMFMzWIz&index=1) ning SnapCAD-ga kaasas olevaid õppefaile, et omandada programmi käsitsemise oskused.
Seejärel sidusime omavahel mehaanika, füüsika ja modelleerimise. Tegime tutvust kuue lihtmehhanismiga (teooriat ja arvutusi on võimalik siduda 8. klassi füüsikaga) ning ehitasime nende mudelid, kasutades VEQ IQ kodulehel asuvaid juhendeid (www.vexrobotics.com/vexiq/education/iq-curriculum/simple-machines-and-motion).
Modelleerisime SnapCAD-is esialgu ühe lihtmehhanismi mudeli. See oli esimene 3D mudel, mille õpilased ise algusest peale modelleerima pidid. Varasemates õppeülesannetes olid mudelid neile ette antud. Kuna õpilased said ise disainimiseks mehhanismi valida, siis modelleeriti valdavalt kaldteed, mis oli esimeseks tööks piisavalt lihtsa keerukusastmega.
Seejärel sidusime omavahel mehaanika, füüsika ja modelleerimise. Tegime tutvust kuue lihtmehhanismiga (teooriat ja arvutusi on võimalik siduda 8. klassi füüsikaga) ning ehitasime nende mudelid, kasutades VEQ IQ kodulehel asuvaid juhendeid (www.vexrobotics.com/vexiq/education/iq-curriculum/simple-machines-and-motion).
Modelleerisime SnapCAD-is esialgu ühe lihtmehhanismi mudeli. See oli esimene 3D mudel, mille õpilased ise algusest peale modelleerima pidid. Varasemates õppeülesannetes olid mudelid neile ette antud. Kuna õpilased said ise disainimiseks mehhanismi valida, siis modelleeriti valdavalt kaldteed, mis oli esimeseks tööks piisavalt lihtsa keerukusastmega.
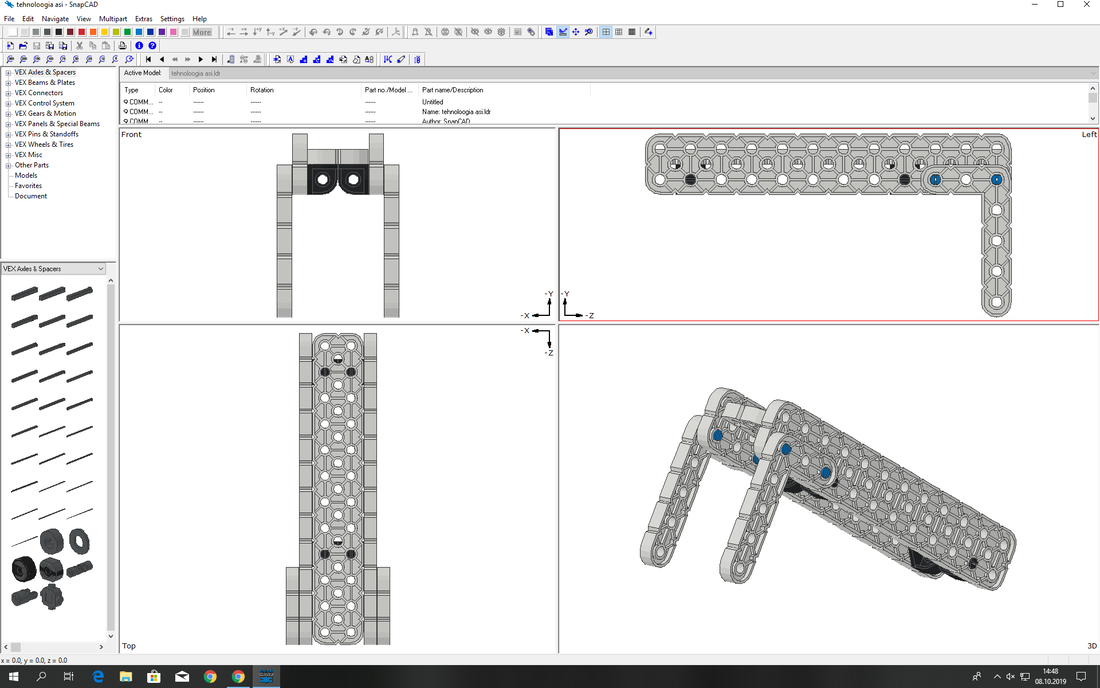
SnapCAD-is modelleeritud kaldtee: Romario (7.a)
LIhtmehhanismidest ahelreaktsiooni masinani
Järgmise ülesandena liitsime valmistatud lihtmehhanismid üheks terviklikuks ahelreaktsiooni masinaks. Varem valmistatud lihtmehhanismide mudeleid tuli pisut muuta ning ning omavahel tervikuks siduda. Selleks kasutasime VEQ IQ kodulehel olevat juhendit (www.vexrobotics.com/vexiq/education/iq-curriculum/chain-reaction-challenge).
Juhendi järgi ehitatud VEX IQ ahelreaktsiooni masin: Rasmus (7.a)
Juhendi järgi ehitatud VEX IQ ahelreaktsiooni masin: Kaspar (7.c)
Seejärel naasesime modelleerimise juurde. Esialgselt oli planeeritud töö nõnda, et õpilased valmistavad ise kõik lihtmehhanismide 3D mudelid ning seejärel saavad need omavahel jagades hiljem tervikuks liita ning vajalikud detailid juurde lisada. Tulenevalt sellest, et õpilased valisid valdavalt vaid ühe lihtmehhanismi projekteerimise ning 3D modelleerimine SnapCAD-is oli paljudele suureks väljakutseks, tuli õppekorraldust pisut planeerituga võrreldes muuta. Õpilased said õpetajalt valmis lihtmehhanismide mudelid ning nende ülesandeks jäi erinevate mudelite tervikuks sidumine ning vajalike muudatuste ja lisandite sisseviimine. Vaatamata sellele hindasid paljud õpilased seda tööd üsna keeruliseks.
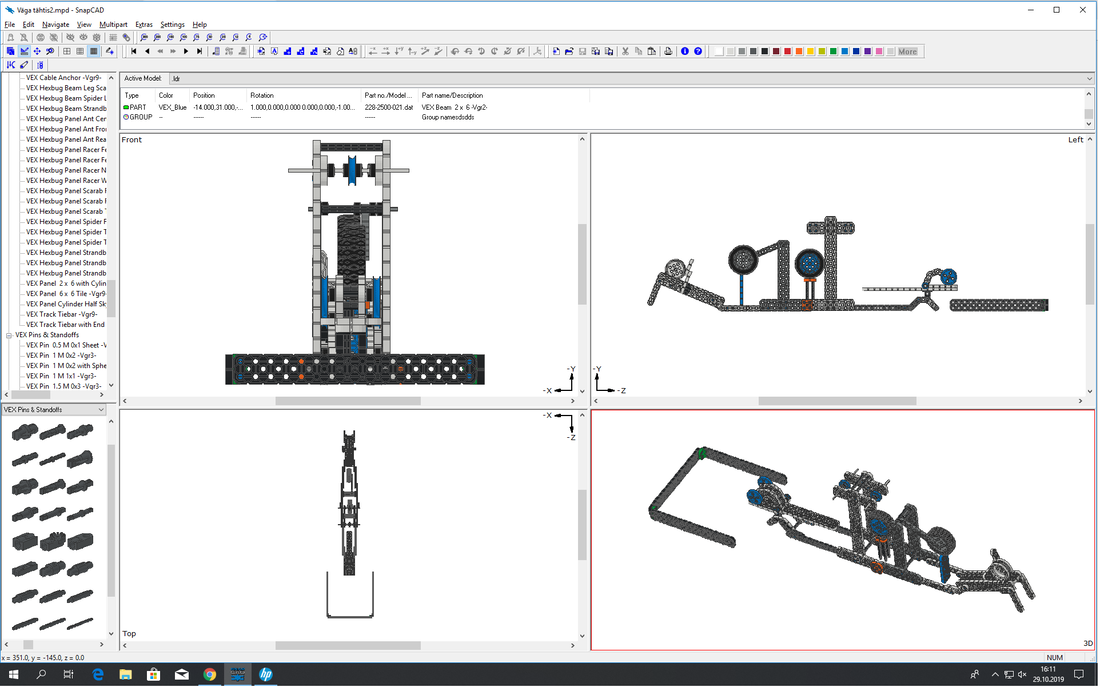
SnapCAD-is valminud ahelreaktsiooni masina mudel: Rasmus (7.a)
Esialgse plaani kohaselt tulnuks õpilastel nüüd ise meeskonnatööna oma ahelreaktsiooni ehk Rube Goldbergi masin modelleerida, kuid kuna modelleerimine SnapCad-is võttis palju aega ning oli mitmele õpilasele päris keeruline ülesanne, siis jätsime modelleerimise sammu vahele ning läksime kavandamise juurest kohe ehitamise juurde.
Rühmatööna pidi valmima vähemalt kuuest elemendist koosnev VEQ IQ vahenditega ehitatud ahelreaktsiooni masin. Üllataval kombel valmistas üsna vabas vormis ülesanne just loovuse koha pealt raskusi. Lõpuks said aga kõik rühmad oma tööga hästi hakkama ning töö käigus oli sageli näha entusiasmi ja hasarti, mis päädis siira rõõmuga, kui masin mitme katse järel toimis.
Rühmatööna pidi valmima vähemalt kuuest elemendist koosnev VEQ IQ vahenditega ehitatud ahelreaktsiooni masin. Üllataval kombel valmistas üsna vabas vormis ülesanne just loovuse koha pealt raskusi. Lõpuks said aga kõik rühmad oma tööga hästi hakkama ning töö käigus oli sageli näha entusiasmi ja hasarti, mis päädis siira rõõmuga, kui masin mitme katse järel toimis.
Vabas vormis disainitud VEX IQ ahelreaktsiooni masin: Markus ja Even Tristan (7.a)
Vabas vormis disainitud VEX IQ ahelreaktsiooni masin: Renar (7.a)
Vabas vormis disainitud VEX IQ ahelreaktsiooni masin: Sander ja Rasmus (7.b)
Vabas vormis disainitud VEX IQ ahelreaktsiooni masin: Reno (7.c)
Vabas vormis disainitud VEX IQ ahelreaktsiooni masin: Ats (7.c)
Ülekanded
Järgmise teemana käsitlesime erinevaid ülekande tüüpe. Saime meelde tuletada energia ülekandmist ja muundamist. Samuti saab seda teemat lihtsalt siduda erinevate sõidukite (nt auto, jalgratas) tööpõhimõtetega. Teoreetilises osas saime kasutada 6. klassi tehnoloogia õpikut (teema "Kuidas miski töötab?"). Täpsemalt tegime tutvust hammasülekandega. Kasutasime VEQ IQ juhendmaterjale (www.vexrobotics.com/vexiq/education/iq-curriculum/mechanisms/gear-ratio), mille abil ehitasime erinevaid hammasülekandeid ja arvutasime ülekandesuhet. Tegime selgeks kiirendava ja aeglustava ülekande.
Hammasülekanne ja ülekandearv: Sander (7.b)
Järgmise praktilise ülesandena ehitasime erinevat tüüpi käigukaste. Kahjuks pole meil praegusel hetkel koolis vajalikke VEX IQ lisakomplekte (Differential & Bevel Gear Pack, Chain & Sprocket Kit), mis võimaldaks keerulisemate ülekannete ehitamist. Seetõttu kasutasime käigukastide ehitamisel LEGO vahendeid. Kahjuks oli ka nende vahenditega käigukastide ehitamisel piiranguid, sest selliste mudelite ehitamiseks on ette nähtud LEGO Technic detailid, kuid koolis on kasutusel LEGO Education tooted. Vaatamata raskustele saime mõned käigukasti mudelid siiski ehitada.
Käigukasti mudel: Martin (7.a)
Käigukasti mudel: Risto (7.b)
Käigukasti mudel: Romet (7.c)
Järgmisena rakendasime õpitud oskusi kiirendus- ja mäkketõusu roboti ehitamise juures. Valminud VEX IQ robotid ei olnud sageli just kõige otstarbekama ehitusega, kuid seda suurem oli rõõm edukast jõukatsumisest teiste robotite vastu. Kuna eesmaärk oli ülekannete raames õpitu rakendamine ja kinnistamine, siis kasutasime selle ülesande juures robotite juhtimiseks pulti.
VEX IQ kiirendus- ja mäkketõusu võistlus: Risto (7.b)
VEX IQ kiirendus- ja mäkketõusu võistlus: Gregor (7.c)
Modelleerimine Tinkercadis
Pöördusime tagasi modelleerimise juurde eesmärgiga disainida midagi sellist, mida saaks 3D-printeriga valmistada. Õppeaasta alguses oli esialgne plaan kasutada SnapCAD-is omanadatud teadmisi mõne VEX IQ roboti lisadetaili modelleerimiseks ja printimiseks (www.vexrobotics.com/vexiq/resources/cad-snapcad#3d). Kuna mitme õpilase arvates oli SnapCAD-i kasutamine pisut keeruline ning lähenemas oli ka sõbrapäev (eesmärk oli modelleerida ja trükkida üks sõbrapäeva meene), siis sai esialgseid plaane muudetud ning otsustasime modelleerimist katsetada online Tinkercad keskkonnas (www.tinkercad.com/). Tinkercadi eelliseks on tema suhteline kasutamislihtsus ja online keskkond. Samuti võimaldab Tinkercad õpetajal luua oma klasse ning hallata selles õpilasi. See annab õpetajale võimaluse vajadusel jälgida õpilase poolt tehtavat tööd (mis osutus hilisema distantsõppe juures äärmiselt tõhusaks võimaluseks).
Esimeseks tööna disainisime käsilase mudeli. Kasutasime Youtube'i videot (www.youtube.com/watch?v=5WeMZ7Dl78E&feature=youtu.be), mis andis hea ülevaate erinevate kujundite kasutamisest, ogjektide liitmisest ja kopeerimisest. Valmisid põnevad käsilased, mille juures ei puudunud ka õpilaste fantaasia vili.
Esimeseks tööna disainisime käsilase mudeli. Kasutasime Youtube'i videot (www.youtube.com/watch?v=5WeMZ7Dl78E&feature=youtu.be), mis andis hea ülevaate erinevate kujundite kasutamisest, ogjektide liitmisest ja kopeerimisest. Valmisid põnevad käsilased, mille juures ei puudunud ka õpilaste fantaasia vili.
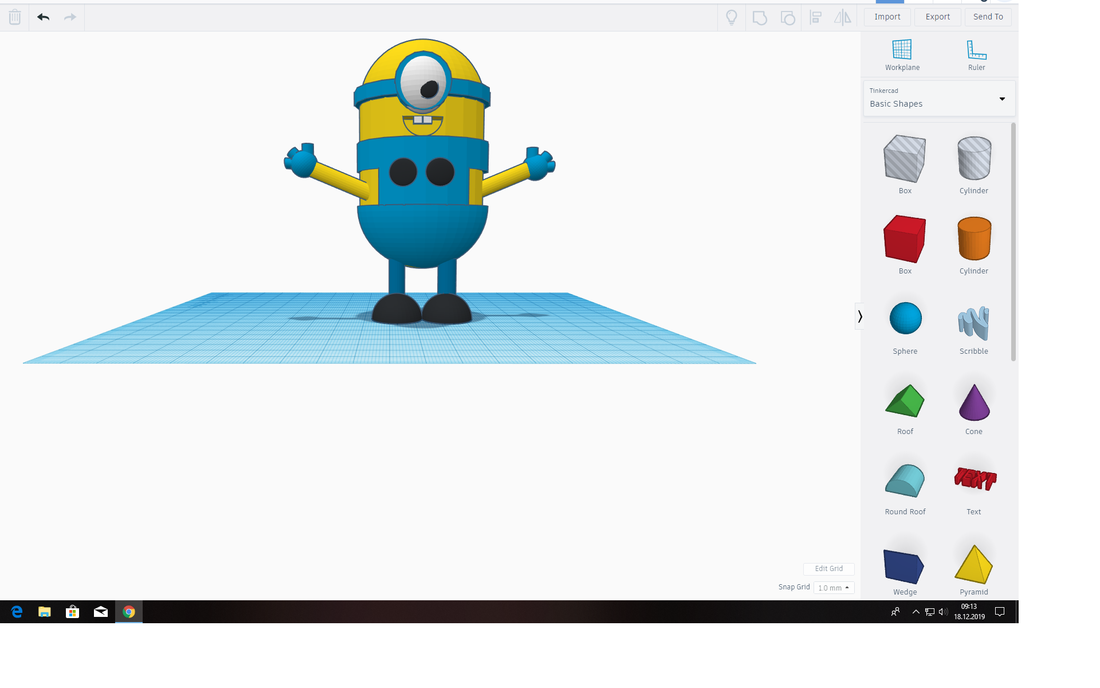
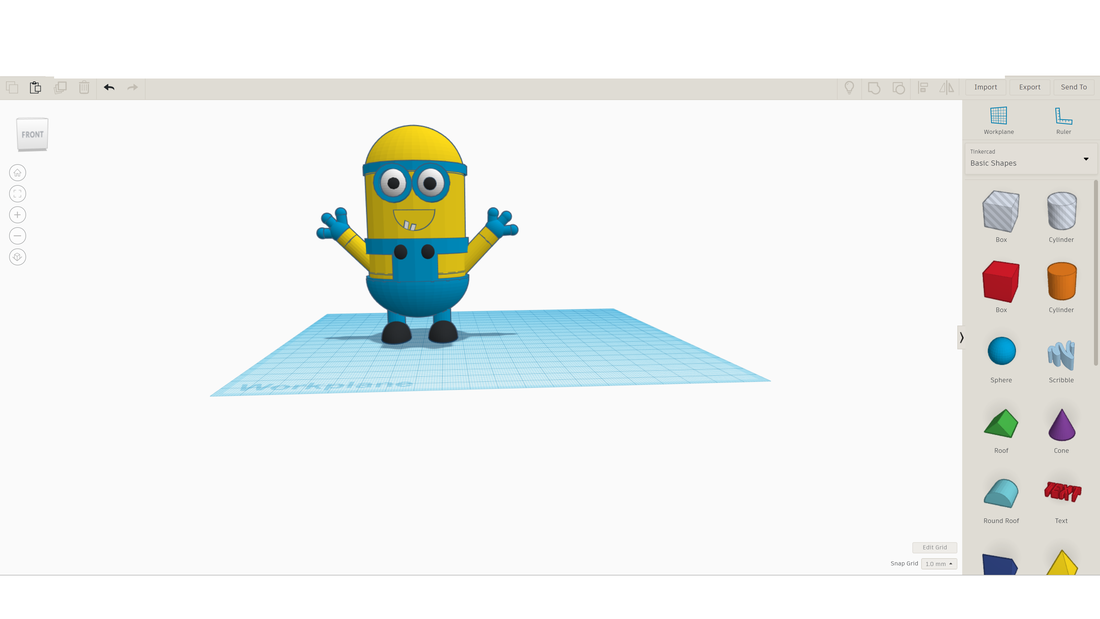
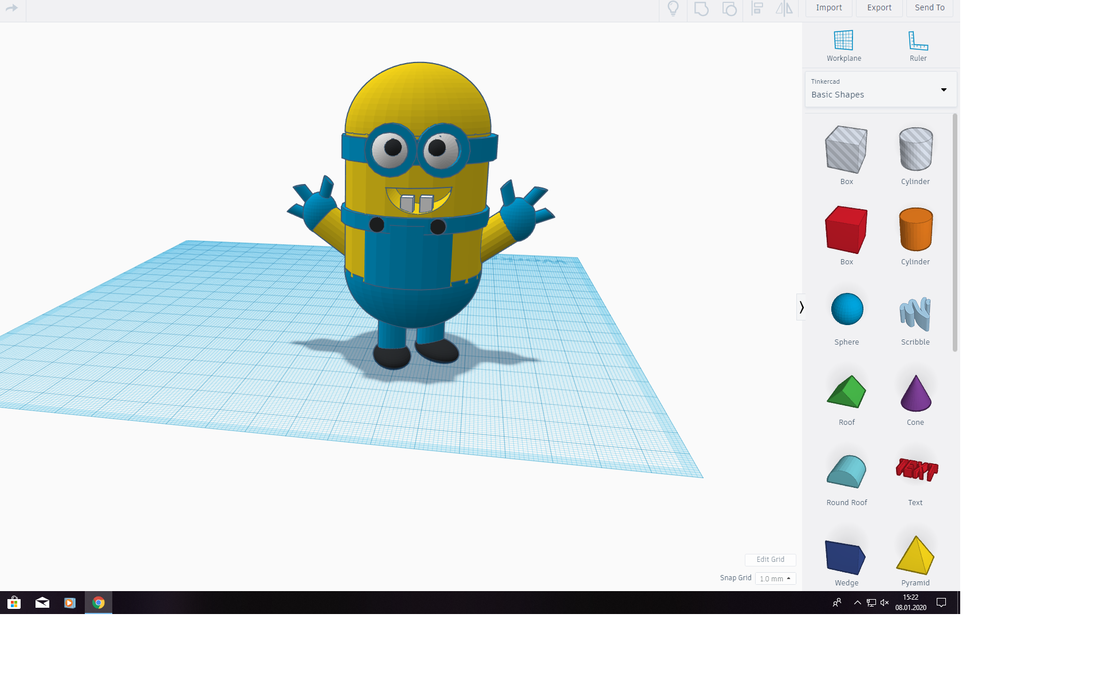
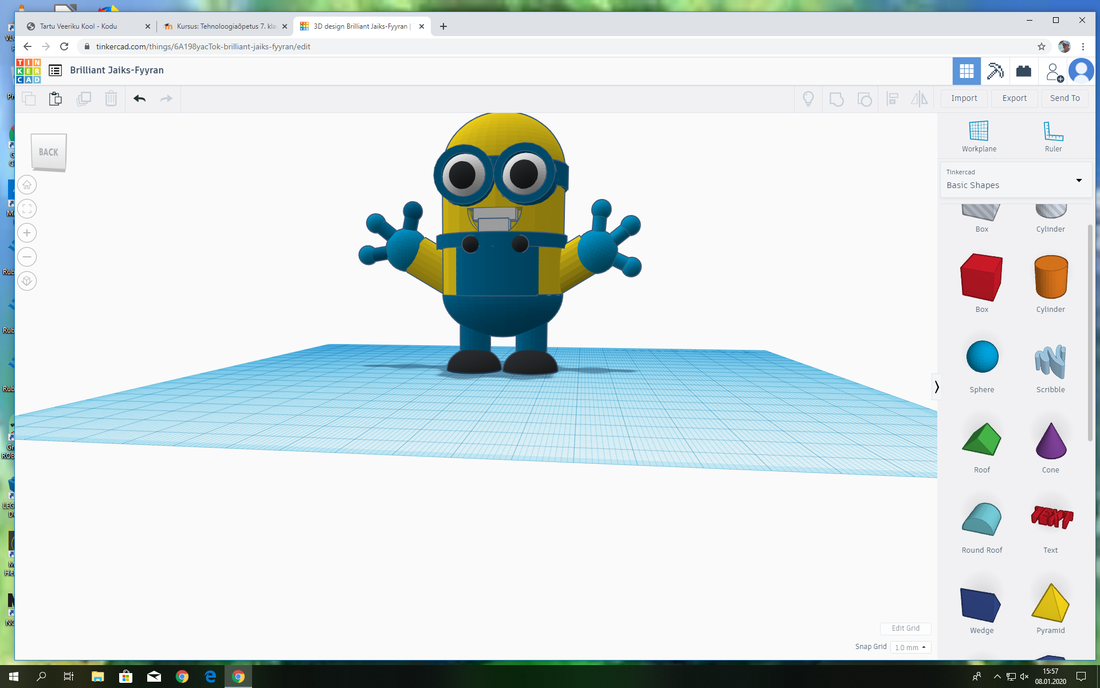
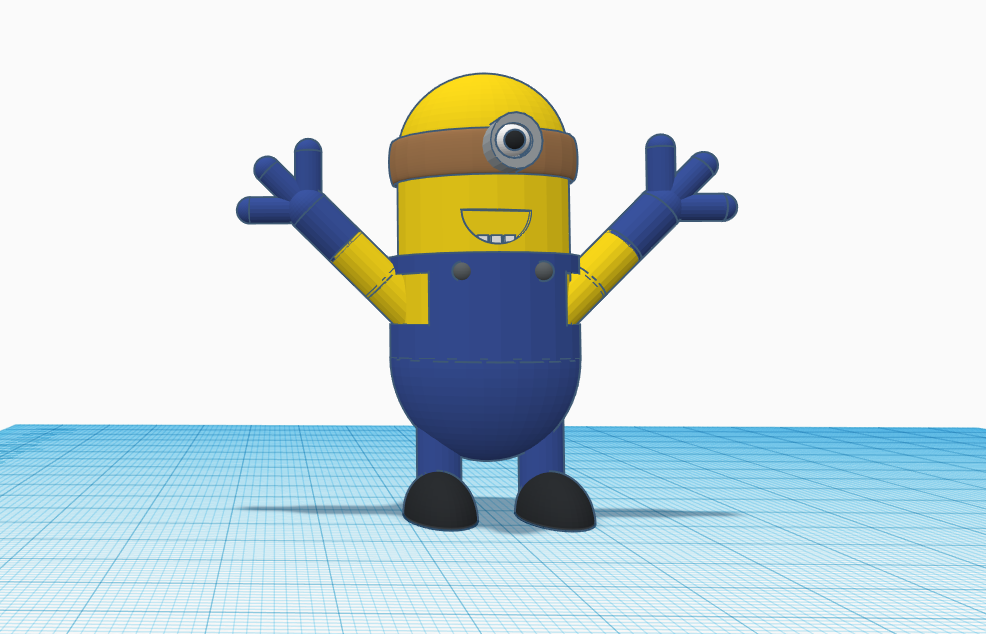

Tinkercadis modelleeritud käsilased: Richard (7.a), Mark (7.a), Renee (7.b), Rasmus (7.b), Gregor (7.c), Airon (7.c)
Järgnevalt modelleeris iga õpilane sõbrapäeva meene, mis sai 3D-printeriga trükitud. Kuna sõbrapäeva meened olid mõeldud üllatusena, siis nende pilte me õpiveebides ei avaldanud.
VEX IQ robootika
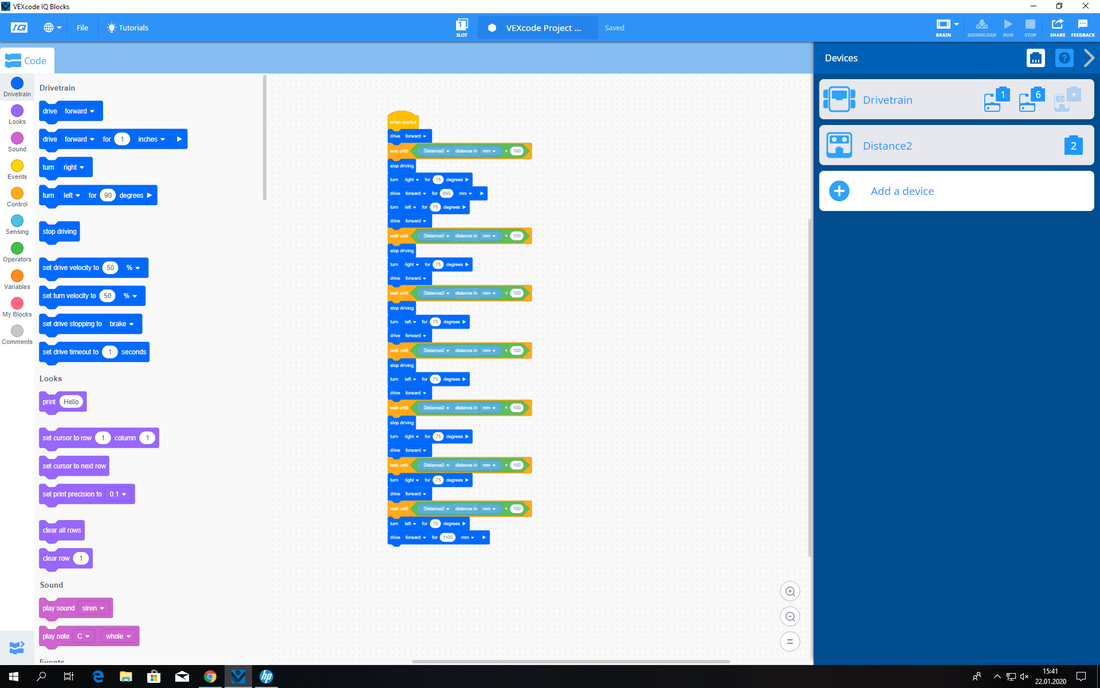
Pärast kõrvalepõiget modelleerimisse naasesime VEX IQ robotite juurde. Nüüd oli eesmärgiks, lisaks robotite ehitamisele, õppida roboteid programmeerima. Programmeerimiskeskkonnaks oli VEXcode IQ blocks (www.vexrobotics.com/vexcode-blocks). Esimene ülesanne oli juhendit (www.vexrobotics.com/vexiq/education/iq-curriculum/your-first-robot/build-instructions) kasutades ehitada lihtne neljarattaline robot (Drive Base) . Seejärel tuli robot panna mööda piiratud rada sõitma. Esimese ülesande juures me andureid ei kasutanud.
Raja läbimine VEX IQ robotiga: Kaaren (7.a)
Raja läbimine VEX IQ robotiga: Rasmus (7.b)
Raja läbimise programmid VEXcode IQ blocks programmis: Kaaren (7.a), Martin (7.a)
Järgmise ülesande jaoks lisasime VEX IQ baasrobotile ultraheli anduri. Nüüd tuli panna robot ultraheli anduri abil labürinti läbima.
Labürindi läbimine VEX IQ robotiga: Kaspar (7.c)
Labürindi läbimise programmid VEXcode IQ blocks programmis: Kaspar (7.c)
Kolmanda robootikaülesande jaoks ehitasime uue roboti, millel oli lisaks sõidumootoritele tõstuki ja haaratsi mootor (www.vexrobotics.com/vexiq/resources/animated-build/clawbot-iq#1). Valminud roboti ülesandeks oli puuteanduri abil fikseerida objekti olemasolu ning see haaratsi ja tõstuki abil ettenähtud kohta transportida.
Haaratsi ja tõstuki abil objekti liigutamine VEX IQ robotiga: Romario (7.a)
Haaratsi ja tõstuki abil objekti liigutamine VEX IQ robotiga: Sander (7.b)
Haaratsi ja tõstuki abil objekti liigutamine VEX IQ robotiga: Kaspar (7.a)
Haaratsi ja tõstuki abil objekti liigutamise programmid VEXcode IQ blocks programmis: Romario (7.a), Sander (7.b), Kaspar (7.a)
Enne distantsõppele suundumist jõudsime VEX IQ robotitega katsetada Ringmaster võistlust (www.youtube.com/watch?v=L7suUUs7fsU). Jõudsime läbi teha kõik kolm võistlust: roboti juhtimine puldiga koostöös teise võistkonnaga, roboti juhtimine puldiga individuaalselt, eelnevalt programmeeritud roboti sõit. Kahjuks ei saanud me enam aga neid videosid töödelda ja õpiveebi lisada.
Projektitöö - distantsõpe
Kevadeks oli planeeritud projektitöö tegemine, mille raames pidid õpilased üksi või rühmana valima õppeaasta kooksul õpitust lähtuvalt mingi teema, mille kohta nad sooviksid koostada põhjalikuma töö. Kahjuks langes projektitöö algus kokku distantsõppe algusega, mis tähendas seda, et õpilaste juehndamine on raskendatud. Samuti on tehnilised vahendid koolimajas ning neid ei saa antud töö raames kasutada. Sellest tulenevalt valis enamus õpilasi projektitööks Tinkercadis modelleerimise. Kuna Tinkercad on veebipõhine keskkond, siis on seda kodustes tingimustes võimalik ilma ettevalmistuseta (programmi arvutisse paigaldmine) kasutada. Projektitöö esitamise tähtaeg on mai algus, kuid juba on näha väga põnevate tööde valmimist. Mitu rühma töötab koolimaja mudeli kallal. Valmimas on väga detailne Tartu tagurpidi maja mudel ning rida teisi huvitavaid hooneid.
Vaatamata keerukusele on mitu õpilast valinud oma töö sisuks roboti modelleerimise SnapCAD-i keskkonnas. Samuti on projektitööna valminud erinevad kodustes tingimustes ja käepäeraste vahenditega meisterdatud ahelreaktsiooni masinad, millest üks osaleb ka ETV ja Rakett 69 Goldbergi masina konkursil (novaator.err.ee/k/goldbergimasin). Eriti põnev ja suure väljakutsega on ühe õpilase töö, mis hõlmab roboti programmeerimist. Kuna robot asub koolimajas, siis oleme seda ülesannet teinud õpilasega koostöös videosilla vahendusel.
Vaatamata keerukusele on mitu õpilast valinud oma töö sisuks roboti modelleerimise SnapCAD-i keskkonnas. Samuti on projektitööna valminud erinevad kodustes tingimustes ja käepäeraste vahenditega meisterdatud ahelreaktsiooni masinad, millest üks osaleb ka ETV ja Rakett 69 Goldbergi masina konkursil (novaator.err.ee/k/goldbergimasin). Eriti põnev ja suure väljakutsega on ühe õpilase töö, mis hõlmab roboti programmeerimist. Kuna robot asub koolimajas, siis oleme seda ülesannet teinud õpilasega koostöös videosilla vahendusel.
